研究
本研究室では、学生が希望する研究テーマを、教員の指導のもとで学術論文として発表可能なレベルまで発展させるスタイルで研究を進めてきました。
その結果、さまざまな分野において研究成果を発表しています。
以下に、その研究の一部を紹介します。
認知心理学
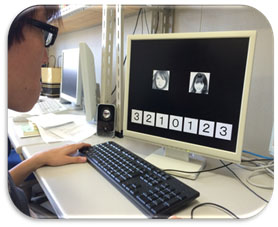
選好判断
複数の対象から好きなものを一つ選択するとき、我々はその対象に関する知識、経験、好みなどを勘案し判断します。しかし、その判断は、対象の性質とは直接関係のない要因、たとえば対象を見る時間や、見る順番、他者の視線などによって「無意識のうちに」変化することが知られています。つまり、自分のココロと相談して選択しているつもりでも、そのココロは無意識のうちに偶然的に生じうる状況や環境の影響を受けているのです。 本研究室では、選好判断に影響を与える要因を調査し、さらにそのメカニズムを明らかにしようとしています。
→詳細はこちら
空気圧を利用した機械
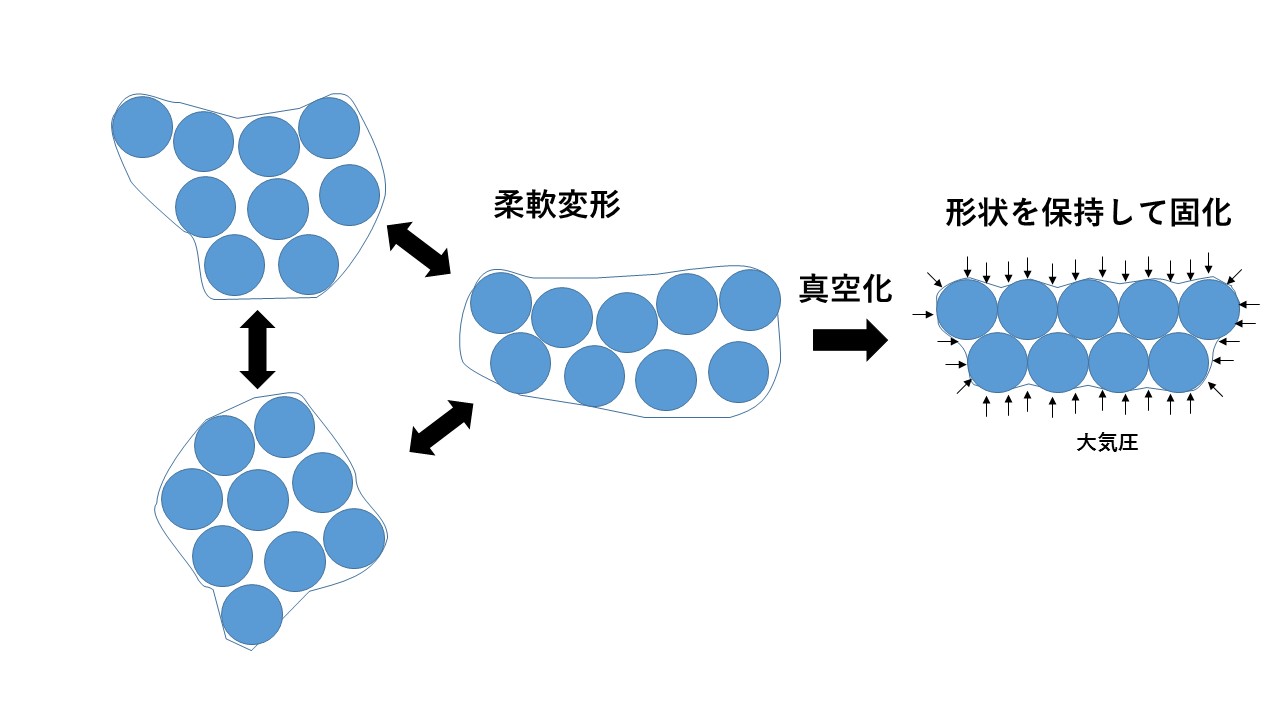
空気圧で硬さが変わるメカニズム
粒子を詰めた柔軟な袋の内部の空気を排出すると、粒子どうしが凝集し、袋全体が硬くなります。そして、空気を袋の中に戻すと、元の柔らかい状態に戻ります。この現象(粒子ジャミング Granular jamming)を利用した機械要素を我々は粒子内蔵型機械拘束要素(PMC:Particle Mechanical Constraint)と呼んでいます。PMCは、軽量、柔軟であることから、人間に接する機械インターフェースに適していると考えています。これまで、PMCを用いてさまざまな応用開発を行ってきました。また、粒子以外の物体を入れた他の構造の機械要素も多数提案してきました。内部の空気を抜くことで硬くなる可変剛性シートも開発しています。
→詳しくはこちら
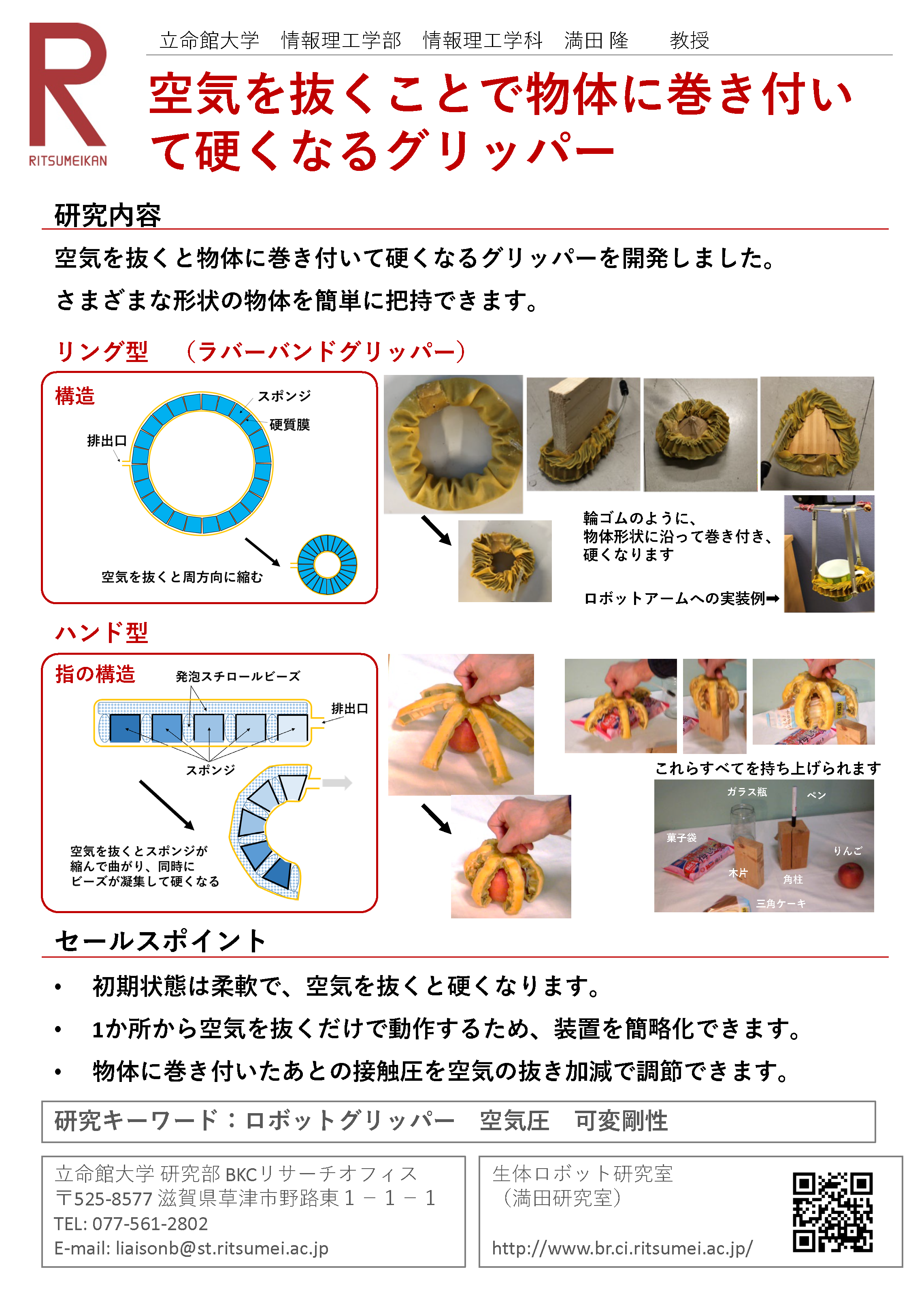
柔軟なグリッパー
さまざまな形状の物体を優しく把持するための柔軟ロボットグリッパーを各種開発しています。豆腐をまるごと掴みあげたり、ドアの取っ手を回したりできます。
ヒューマンインターフェース

力覚提示
物を持ったり、動かしたりする感覚や、壁を登ったり、坂道を歩いたり、砂浜を歩いたり、といったさまざまな身体の動きに関する感覚を提示する手法を研究しています。
体肢を圧迫することで生じる錯覚を利用した力覚提示は、軽量で安全に大きな力を提示できることが特長です。
→詳細はこちら
視覚運動変換
目の前にある物体に手を伸ばしてつかむ動作を脳はどのように実現しているのでしょうか? 1.物体位置をどのような座標系で認識しているのか? 2.腕の到達運動をどのように計画しているのか? 3.筋活動をどのように生成しているのか? 心理物理実験やfNIRSによる非侵襲脳計測の手段を用いて研究しています。 また、視覚情報と身体情報を用いた歩行距離や歩行速度の知覚メカニズムについても研究しています。